Sinyalize kavşak yönetiminde araçları algılamak için sensör olarak kullanılan, loop dedektörler ile trafik kameralarının farkının ne olduğu konusunda bilgiler vermeye çalışacağız. Uzun yıllar boyunca araç sayılarının tespit edilmesi için kullanılan loop dedektörler SCATS ve SCOOT gibi algoritmalarla zamanla kavşak yönetiminde de rol almaya başlamıştır. Bununla birlikte, bu sensörlerin asfaltın kesilerek zemine yerleştirilmesi her zaman önemli bir sıkıntı olarak ön plana çıkmıştır ve bu sebeple birçok farklı sensör alternatif olarak üretilmiş ancak 2000’li yılların başına kadar loop dedektörlerin sunduğu maliyet / performans başarısını sağlayamamıştır.
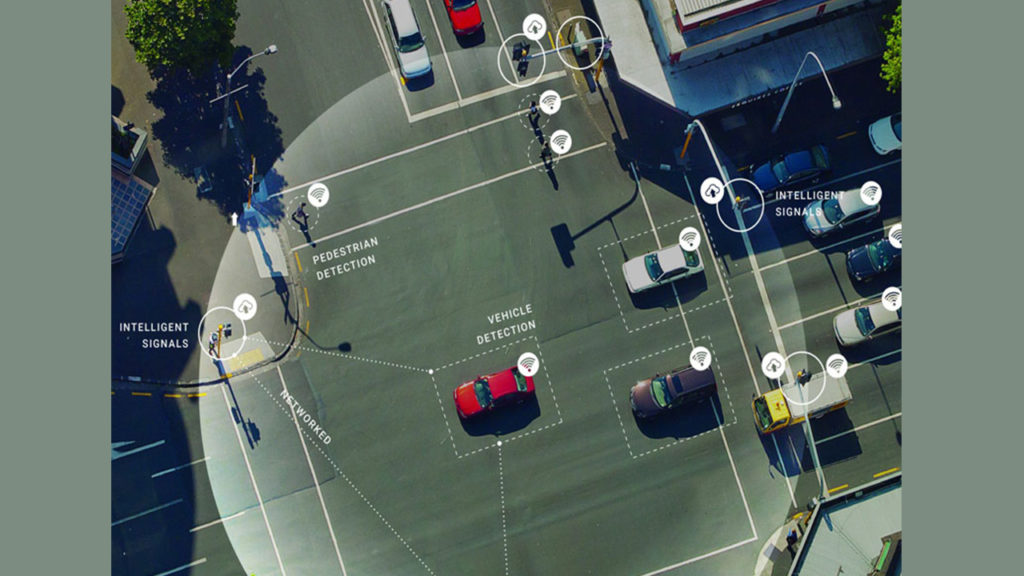
Görüntü sensörü teknolojisinde son 20 yılda sağlanan ilerlemeler sayesinde kameralar hem maliyet hem de görüntü kalitesi açısından çok avantajlı bir duruma gelmiş ve bu sayede trafik yönetiminde kameraların kullanılması hız kazanmıştır. Özellikle IP tabanlı yüksek çözünürlüklü kameraların ucuzlaması ve saha dayanımının artması ile günümüzde, kavşak yönetiminde trafik kameralarının kullanımı loop dedektör kullanımının önüne geçmiştir. Ülkemize özel bazı durumlar ise trafik kameralarının loop dedektörlere tercihini neredeyse zorunlu hale getirmektedir. Asfalt kalitesinin düşük olması, ağır vasıtaların izin verilenden daha yüksek tonajlarda yük taşıması sonucu zemine zarar vermesi gibi sebeplerle loop dedektörlerin ortalama ömrü yaklaşık bir yıl olarak hesaplanmaktadır. Bununla birlikte, hizmet seviyesi zaten düşük olan sinyalize kavşaklarda sadece araç sayımı esasına göre işleyen sistemler (loop dedektör tabanlı) verim olarak işgaliye hesaplayabilen sistemlerin (trafik kamerası tabanlı) çok gerisinde kalmaktadır.
Aşağıda loop dedektörler ile trafik kameralarının avantaj/dezavantaj listesi sunulmaktadır:
Loop dedektörlerin avantajları:
Sayım değerlerinde yüksek doğruluk,
Araç sınıflandırma kabiliyeti.
Loop dedektörlerin dezavantajları:
Kurulum esnasında asfaltın kesilmesi gerekliliği,
Asfaltın kesilmesi nedeni ile yolun deforme olması,
Asfaltın hareketi sonucu yola döşenen kabloların zarar görmesi ve devre dışı kalması.
Trafik Kameralarının avantajları:
Kurulum esnasında yola/zemine müdahale gerektirmemesi,
Zeminde yapılacak çalışmalardan etkilenmeme,
Yönlerde geniş bir alan boyunca işgaliye değeri üretebilme.
Trafik Kameralarının dezavantajları:
Kamera direği gereksinimi,
Araç sınıflandırmada göreceli düşük performans.
Yukarıda bahsedilen etmenler göz önünde bulundurulduğunda, 4 yönlü ve her yönü üç şeritli bir sinyalize kavşak için toplam 24 adet loop dedektör (her şerit için bir giriş bir çıkış dedektörü olmak üzere) kullanılırken aynı kavşakta yoğunluk tespiti için 4 adet kamera kullanımı yeterli olacaktır. Bu durumda, loop dedektör çözümünde ortalama her ay 2 kez servis verilmesi gerekirken trafik kameralı çözüm için ortalama servis periyodu 9 ay olacaktır. (trafik kameralarının MTBF değeri yaklaşık 3 yıl olarak ele alınmıştır. Bu değer çok daha yüksek olabilmektedir.) İkinci temel unsur olan performans ele alındığında, simülasyon ortamında ve gerçek veriler ışığında trafik kameralı çözümler, optimize edilmiş sinyal sürelerine göre %42 daha az bekleme süresi üretebilirken aynı değer loop dedektörlü çözümler için %32 olarak verilmektedir. Aynı örnekten hareketle, 24 adet loop dedektör yerleşimi kameralı çözüme göre daha yüksek maliyetlere neden olacaktır. Bununla birlikte kurulum süresi de loop dedektörlü çözüm için çok daha yüksek olacaktır.
Çok yönlü ve çok şeritli kavşaklarda loop dedektör kullanımı trafik kameralı çözüme göre hem maliyet, hem performans hem de servis ihtiyacı anlamında dezavantajlı konumdadır. Buna karşılık özellikle ‘T’ kavşak olarak bilinen ve sayıca az araca servis veren 3 yönlü yarı trafik uyarmalı kavşaklarda halen loop dedektör kullanımı avantajlı olabilmektedir. Ülkemiz koşulları göz önünde bulundurulduğunda trafik kameralı çözümler çok daha etkin olabilmektedir. Ancak halen bilinirliği ve örnekleri az olduğu için trafik kameralarının çok daha düşük maliyetlerle ve yüksek performansla işletilebileceği yerlerde loop dedektörler kullanılabilmektedir. Sonuç olarak, tam uyarmalı sistemlerin kurulumunda kullanılacak sensörlerin seçiminde yukarıda bahsedilen parametreler kullanılarak karar verilmelidir. Genel olarak yüksek servis sunması planlanan kavşaklarda trafik kameralı çözüm avantajlı olurken, nispeten küçük ve servisi düşük kavşaklarda ise sınırlı sayıda loop dedektörün kullanılması şartıyla loop dedektörlü çözüm avantajlı olabilecektir.